
")

Adatfúzió a városi közúti közlekedésben
A közúti közlekedés forgalomtechnikai paramétereinek megfelelő ismerete döntő fontosságú a színvonalas utazási szolgáltatások biztosításához - akár egyéni, akár közösségi közlekedésről legyen szó. Napjainkban számos forrásból keletkeznek nagy mennyiségben valós idejű, illetve historikus forgalmi adatok, melyek a hálózat eltérő területeiről származhatnak, akár eltérő időpontokban és pontosságuk is eltérő lehet. Természetes cél, hogy a sok heterogén részletből egy egységes egészet képezzünk a teljes hálózatra vonatkozóan. Ezt szolgálja az adatfúzió, amelyet a kutatásaink során kapcsolt Kalman-szűrővel, illetve Kalman/H-végtelen szűrővel valósítottunk meg. A módszertanok alkalmazásával eljutási idő és járműszám becslésére nyílik lehetőség városi közúti hálózatokon.
Az adatfúzió nem egy konkrét technika, hanem egy olyan alapfeladat, ahol különböző információkat kell közös nevezőre hozni. Mitchell H. B. (Multi-sensor data fusion: An introduction, New York, Springer, 2007) így határozza meg az adatfúzió definícióját: „Elmélet, technikák és eszközök arra a célra, hogy különböző szenzor-, vagy szenzorokból származtatott adatokat közös reprezentációs formára hozzunk. Szenzorfúzió során az a célunk, hogy növeljük az információ minőségét, hogy az egy számunkra releváns szempontból jobb legyen, mintha az adott forrásokat külön-külön használnánk.”
A kutatásaink célja olyan módszartanok alkalmazása, amelyek különböző szenzorok által szolgáltatott adatok fúziójával egyszerű modellek alkalmazásával képesek pontos becslést adni a városi közutak forgalmi állapotára vonatkozóan.
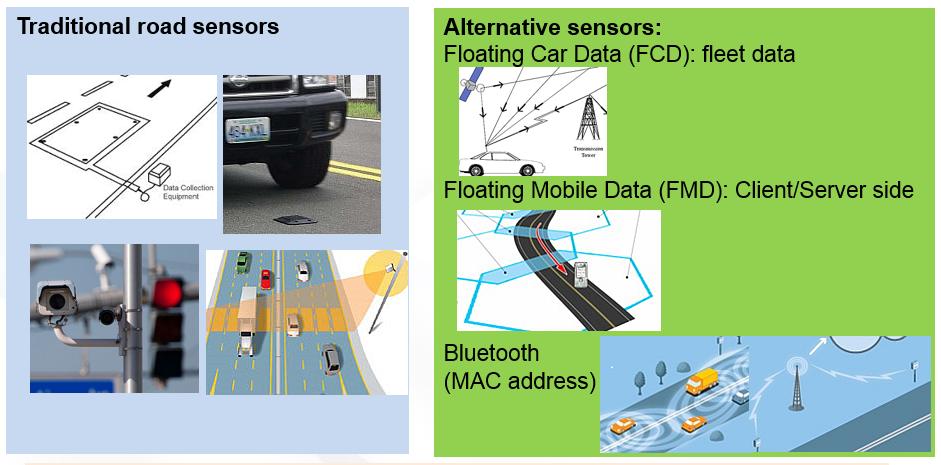
A tanszéken kifejlesztett adatfúziós módszertanok a közlekedésmérnöki gyakorlatban is sokat alkalmazott Kalman-szűrő technikára épülnek, amely egy rekurzív becslési technika a diszkrét adatok lineáris szűrési problémájára. Kapcsolt Kalman-szűrő segítségével valósult meg a közúti eljutási idő becslése különböző forrásból származó adatok fúziójával, mint például: hurokdetektor, floating car adatok (úszókocsis mérések), járművezetők mobil készülékeinek adatai.
Az adatfúzió alkalmazására egy másik kutatásban a H-végtelen szűrőt, a Kalman-szűrő egy továbbfejlesztett változatát használtuk a forgalomnagyság becslésére hurokdetektoros és floating car adatok fúziójával. A modell jellemzője, hogy figyelembe veszi a csomópontokban a fordulási ráták ismeretlenségéből eredő bizonytalanságot, továbbá útszakasz-szinten használ makroszkopikus forgalmi modelleket, a Two-fluid modellt és a fundamentális összefüggést.
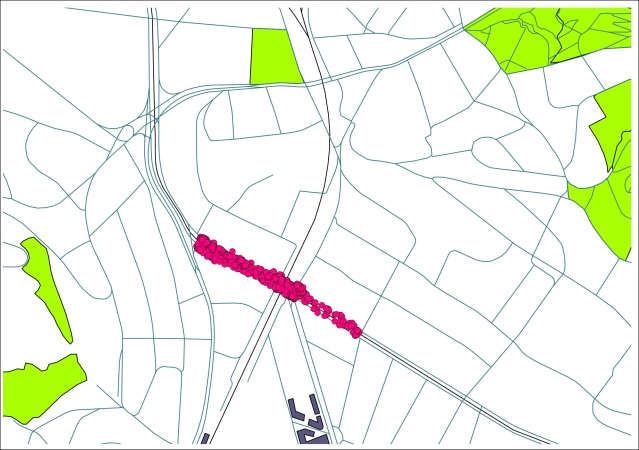
A kapcsolt Kalman-szűrővel megvalósított módszertant a Vissim forgalomszimulációs szoftverben teszteltük, a budapesti hálózatot modellezve, valós forgalmi mérési adatok felhasználásával.
