
")

Data fusion for urban road traffic
The knowledge of road traffic parameters is of crucial importance to ensure state-of-the-art traffic services either in public or private transport. In our days, a plethora of road traffic data are continuously collected producing historical and real-time traffic information as well. The available information, however, arrive from inhomogeneous sensor systems. Therefore, a data fusion methodologies are proposed based on the Switching Kalman Filter and the Kalman/H-infinity Filter. The concepts enable travel time and traffic volume estimation for urban road traffic networks.
Data fusion is not a specific technique, just an object of making an integrated database of different types of information. Mitchell H. B. (Multi-sensor data fusion: An introduction, New York, Springer, 2007) defines data fusion as follows: ’The theory, techniques and tools which are used for combining sensor data, or data derived from sensory data, into a common representational format. In performing sensor fusion our aim is to improve the quality of the information, so that it is, in some sense, better than would be possible if the data sources were used individually.’
The purpose of the research work was to find an approach that does not use complicated models and only tries to precisely estimate the traffic state of specific urban roads by the fusion of different types of sensor data.
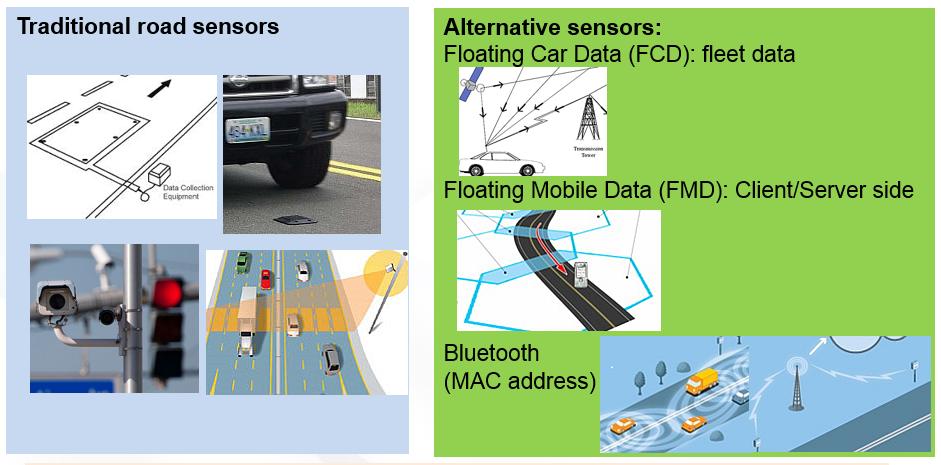
The proposed data fusion methodology is based on the method of the Kalman Filter estimation often used by traffic engineers. This technique is a recursive method for linear filtering of discrete data. The Switching Kalman Filter was applied to travel time estimation from different data sources, e.g. loop-detector data, floating car data or floating mobile data.
Another implementation of data fusion was based on the H-infinity Filter, which is a variant of the Kalman Filter. In this research work the number of vehicles was estimated based on loop-detector data and floating car data. The model takes into consideration the uncertainty of turning rates in junctions and also uses different macroscopic traffic models (the Two-fluid model and the fundamental diagram) at the level of links.
The Switching Kalman Filter methodology was implemented in Vissim microscopic traffic simulation software, modeling a real part of the road network in Budapest based on real traffic data.
