
")

Kutatási témák közúti közlekedés területén
KÖZÚTI JÁRMŰVEK KOOPERATÍV IRÁNYÍTÁSÁNAK TERVEZÉSE
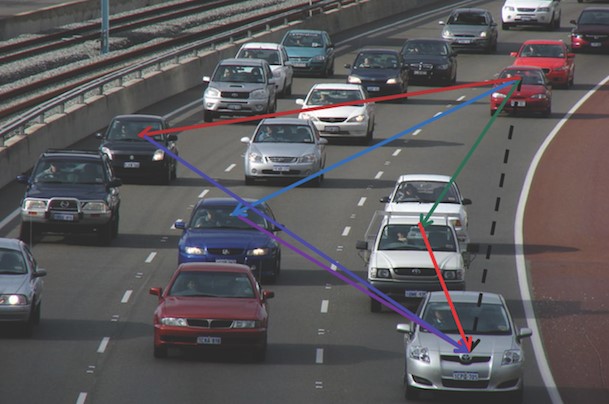 A közlekedésben résztvevő járművek és csoportok menetdinamikai tulajdonságainak összehangolásával a közlekedés hatékonysága és biztonsága növelhető. Az egyes járművek trajektóriájának (pályájának és sebességének) megtervezésében a járműdinamikai jellemzőkön kívül fontos szerepe van a járművek közötti kommunikációnak, azaz a kommunikációs információtartalom járműre gyakorolt hatásának. A menetdinamikai tulajdonságok optimalizálása akár lokális, akár globális szinten közvetve hatással van a szállítás hatékonyságára, a menetidők és üzemanyag fogyasztás csökkenésére, sőt a károsanyag kibocsátás csökkenését is maga után vonja, aminek társadalmi hatása is érezhető.
A közlekedésben résztvevő járművek és csoportok menetdinamikai tulajdonságainak összehangolásával a közlekedés hatékonysága és biztonsága növelhető. Az egyes járművek trajektóriájának (pályájának és sebességének) megtervezésében a járműdinamikai jellemzőkön kívül fontos szerepe van a járművek közötti kommunikációnak, azaz a kommunikációs információtartalom járműre gyakorolt hatásának. A menetdinamikai tulajdonságok optimalizálása akár lokális, akár globális szinten közvetve hatással van a szállítás hatékonyságára, a menetidők és üzemanyag fogyasztás csökkenésére, sőt a károsanyag kibocsátás csökkenését is maga után vonja, aminek társadalmi hatása is érezhető.
A kutatás célja járművek trajektóriájának megtervezése a közlekedésben résztvevő járművek, illetve járműcsoport figyelembe vételével. Irányítástervezési módszerek és algoritmusok kidolgozása során az egyedi járművek dinamikai tulajdonságait, specialitásait, továbbá az algoritmus érzékenységvizsgálatát el kell végezni. Fontos feladat a normál üzemtől való eltérések (pl. útviszonyokban és környezeti viszonyokban bekövetkezett változások), meghibásodások hatásának figyelembe vétele.
Dr. Gáspár Péter
KÖZÚTI JÁRMŰVEK ENERGIAOPTIMÁLIS ADAPTÍV SEBESSÉGSZABÁLYOZÁSÁNAK TERVEZÉSE
 Az adaptív sebességszabályozás célja az út topografikus viszonyai (útvonal, magassági adatok) és az úton érvényes sebességkorlátozások alapján optimális sebességprofil létrehozása valamely idő- és távolság-horizont és felbontás figyelembevételével. A tervezés többféle kritérium együttes figyelembevételével történik (multikritériumos tervezési feladat).
Az adaptív sebességszabályozás célja az út topografikus viszonyai (útvonal, magassági adatok) és az úton érvényes sebességkorlátozások alapján optimális sebességprofil létrehozása valamely idő- és távolság-horizont és felbontás figyelembevételével. A tervezés többféle kritérium együttes figyelembevételével történik (multikritériumos tervezési feladat).
A kutatás célja egy energiaoptimális adaptív sebességszabályozás megtervezése korszerű irányításelméleti módszerek alkalmazásával. A megbízhatóság növelése és az energiaigény csökkentése multikritériumos optimalizációval történik. A tervezés során az infrastruktúráról és a környező járművekről elérhető információkat is figyelembe kell venni. Ehhez a jármű belső kommunikációján kívül a navigációs térképpel, továbbá a V2I és V2V kommunikációval elérhető információkat is figyelembe kell venni. Az adaptív sebességszabályozó tervezése során nemcsak az infrastruktúra igényeit és korlátait kell figyelembe venni, hanem a környező járművek igényeit is.
Dr. Gáspár Péter
Robusztus városi forgalommodellezés és irányítás
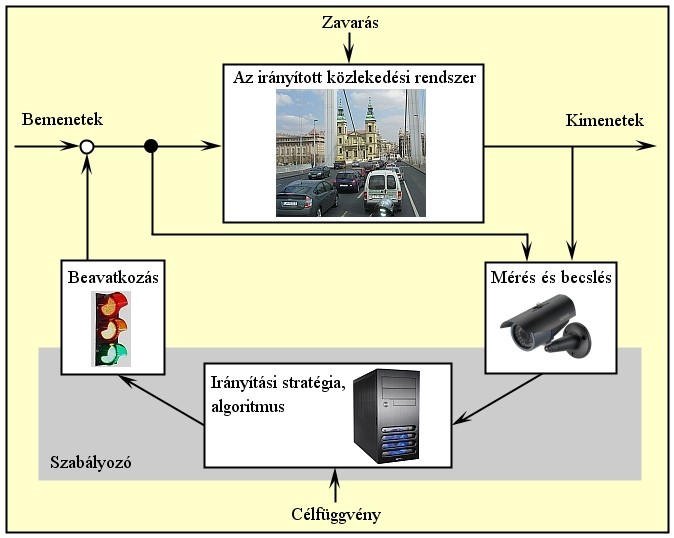 A közúti motorizáció folyamatos növekedése és a velejáró externális következmények egyre nagyobb kihívások elé állítják a közlekedéstervezőket és forgalomirányítókat. A fenntartható közlekedés és az élhető városi környezet biztosításához átfogó stratégia megvalósítására és hálózati szintű irányításra van szükség. Amennyiben a hálózat állapotai ismertek, modell alapú irányítás valósítható meg. A bizonytalansággal (nem mérhető forgalmi igányek) terhelt városi forgalom irányításának újszerű megközelítése a robusztus MPC alkalmazása, ami egy minimax optimalizálás megvalósítása predikciós horizonton. Lényege, hogy úgy próbálja minimalizálni a lámpák előtti sorhosszt, hogy közben a maximális - potenciálisan megjelenő - bizonytalanságot veszi figyelembe. A szabályozó több mintavételi időre előre megjósolja a várható állapotokat (sorhossz) és a hozzájuk tartozó - kiadandó - optimális zöldidőket. Az adott lépésében természetesen mindig csak a legelső horizontra számított zöldidők jutnak érvényre, majd a rendszer “továbbgördül” egy lépést és ismételten számol.
A közúti motorizáció folyamatos növekedése és a velejáró externális következmények egyre nagyobb kihívások elé állítják a közlekedéstervezőket és forgalomirányítókat. A fenntartható közlekedés és az élhető városi környezet biztosításához átfogó stratégia megvalósítására és hálózati szintű irányításra van szükség. Amennyiben a hálózat állapotai ismertek, modell alapú irányítás valósítható meg. A bizonytalansággal (nem mérhető forgalmi igányek) terhelt városi forgalom irányításának újszerű megközelítése a robusztus MPC alkalmazása, ami egy minimax optimalizálás megvalósítása predikciós horizonton. Lényege, hogy úgy próbálja minimalizálni a lámpák előtti sorhosszt, hogy közben a maximális - potenciálisan megjelenő - bizonytalanságot veszi figyelembe. A szabályozó több mintavételi időre előre megjósolja a várható állapotokat (sorhossz) és a hozzájuk tartozó - kiadandó - optimális zöldidőket. Az adott lépésében természetesen mindig csak a legelső horizontra számított zöldidők jutnak érvényre, majd a rendszer “továbbgördül” egy lépést és ismételten számol.
A fentebb ismertetett robusztus MPC stratégiát valós adatok felhasználásával VISSIM szimulátor segítségével validáltuk. Az eredmények igazolják a robusztus stratégia létjogosultságát (a közlekedési paraméterek ~10-30%-os javulása a hagyományos irányításhoz képest). A stratégia felhasználásával olyan zárthurkú forgalomirányítás valósítható meg, amely képes a rendszerre ható nem mérhető zavarások mellett is az optimális zöldidő-kiosztási feladatot valós időben, adaptív módon ellátni. Alkalmazásával tovább növelhető a városi forgalomáramlás hatásfoka, megelőzhető a torlódások kialakulása.
Dr. Tettamanti Tamás
Védett városi hálózat irányítása (perimeter control)
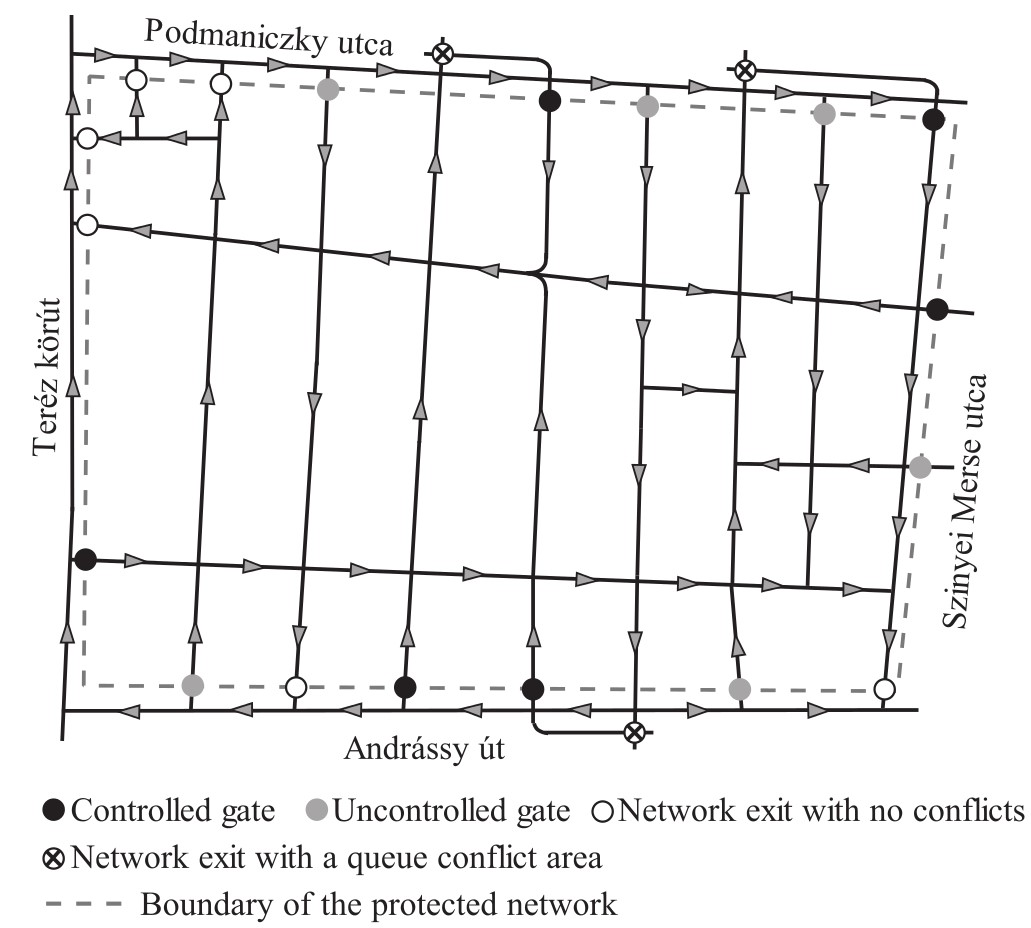 Peremirányítás: alternatív forgalomirányítási koncepció a belvárosi övezetek védelmére. A „perimeter control” módszer célja egy olyan városi forgalomirányítás megvalósítása, amely a védett városi zóna elvét használja fel, s ezen elv segítségével törekszik az optimum megteremtésére az irányítási területen belül. Az irányítási cél az optimális forgalomlefolyás biztosítása a védett zónában torlódásmentesen. A kialakított stratégiában az ún. makroszkopikus fundamentális diagram alapján nemlineáris Model Predictive Control alkalmazásával történik meg a védett zóna szabályozása. A peremirányítás esetén a beavatkozó eszközöket a terület határán elhelyezkedő jelzőlámpás csomópontok jelentik. A fentebb ismertetett robusztus MPC stratégiát valós adatok felhasználásával VISSIM szimulátor segítségével validáltuk Budapest VI. kerületének egy nagyobb részét alapul véve. A módszer fontos elem, hogy a peremen feltorlódó sorokat is képes az irányítási célok között kezelni, így biztosítható, hogy ne alakuljon ki túl nagy mértékű torlódás az irányított zónán kívül sem. Az alkalmazott technika továbbá lehetővé teszi emissziós paraméterek figyelembe vételét az optimalizálás során. Ezáltal multikritériumos MPC szabályozás alakítható ki.
Peremirányítás: alternatív forgalomirányítási koncepció a belvárosi övezetek védelmére. A „perimeter control” módszer célja egy olyan városi forgalomirányítás megvalósítása, amely a védett városi zóna elvét használja fel, s ezen elv segítségével törekszik az optimum megteremtésére az irányítási területen belül. Az irányítási cél az optimális forgalomlefolyás biztosítása a védett zónában torlódásmentesen. A kialakított stratégiában az ún. makroszkopikus fundamentális diagram alapján nemlineáris Model Predictive Control alkalmazásával történik meg a védett zóna szabályozása. A peremirányítás esetén a beavatkozó eszközöket a terület határán elhelyezkedő jelzőlámpás csomópontok jelentik. A fentebb ismertetett robusztus MPC stratégiát valós adatok felhasználásával VISSIM szimulátor segítségével validáltuk Budapest VI. kerületének egy nagyobb részét alapul véve. A módszer fontos elem, hogy a peremen feltorlódó sorokat is képes az irányítási célok között kezelni, így biztosítható, hogy ne alakuljon ki túl nagy mértékű torlódás az irányított zónán kívül sem. Az alkalmazott technika továbbá lehetővé teszi emissziós paraméterek figyelembe vételét az optimalizálás során. Ezáltal multikritériumos MPC szabályozás alakítható ki.
Dr. Tettamanti Tamás
Mobiltelefon hálózati események alkalmazása forgalmi állapotok becslésére
 A mobiltelefonok jelzési eseményei értékes információként használhatók fel a közúti forgalom mérésére, előrebecslésére vagy akár irányítására. A telefonok automatikusan generálnak ún. handover (HO) és location area update (LAU) eseményeket, amelyeket hatékonyan tovább lehet hasznosítani. A HO/LAU események lehetséges alkalmazásainak köre rendkívül széles és napjaink egyik dinamikusan fejlődő kutatási iránya.
A mobiltelefonok jelzési eseményei értékes információként használhatók fel a közúti forgalom mérésére, előrebecslésére vagy akár irányítására. A telefonok automatikusan generálnak ún. handover (HO) és location area update (LAU) eseményeket, amelyeket hatékonyan tovább lehet hasznosítani. A HO/LAU események lehetséges alkalmazásainak köre rendkívül széles és napjaink egyik dinamikusan fejlődő kutatási iránya.
Mobiltelefon-hálózati események anonim módon való felhasználásával lehetőség nyílik a közúti forgalom makro-szintű becslésére, ezáltal modellezésére. Mindez akár valós időben futó algoritmusként is megvalósítható, alapot adva akár az adaptív forgalmirányításhoz. A mobiltelefon jelzési eseményeken alapuló, makroszkopikus forgalombecslési módszertant dolgoztunk ki városi, közúti közlekedési hálózathoz. A módszer alapja, hogy a városi közlekedési modell adaptálható a mobiltelefon-hálózat cella szintű modelljéhez. A mobiltelefon jelzési események mérésével és szűrésével előállítható az adott location area-hoz tartozó célforgalmi mátrix, amely alapján forgalmi ráterhelés végezhető. A ráterheléssel kapott forgalombecslés megbízhatósága tovább finomítható a cellaváltások alapján számolt átlagos utazási időkkel. Az eljárás során az utazási idők addicionális korlátozásként jelennek meg a ráterhelés optimalizálási feladatában. A módszer egy budapesti tesztmérés eredményeit felhasználva kerül bemutatásra. A készülék HO eseményei által “megjelölt” cellákat a forgalmi ráterhelésből kapott útvonalakra illesztettük. A potenciális útvonalak közül az fedte fel a legvalószínűbb trajektóriát, amely a legkisebb négyzetes eltérést adta.
Dr. Tettamanti Tamás
Az intelligens jelzőfej koncepciója
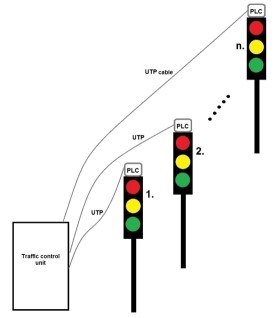 Az intelligens jelzőfejjel történő forgalomirányítás témájában a laboratóriumban fejlesztéseket végzünk. Ennek keretében a közúti jelzőfejre PLC-t (vagy bármilyen kis célszámítógépet) csatolunk, amely kapcsolgatja a jelzőfej izzóit, és kommunikál a forgalomirányító berendezéssel. Legnagyobb előnye, hogy a forgalomirányító berendezésből a jelzőfejek izzóihoz kihúzott elektromos vezetékek hossza lerövidül a PLC és az izzók közötti távolságra. Ezzel jelentős költségmegtakarítást lehet elérni. Video link: http://player.vimeo.com/video/79551622
Az intelligens jelzőfejjel történő forgalomirányítás témájában a laboratóriumban fejlesztéseket végzünk. Ennek keretében a közúti jelzőfejre PLC-t (vagy bármilyen kis célszámítógépet) csatolunk, amely kapcsolgatja a jelzőfej izzóit, és kommunikál a forgalomirányító berendezéssel. Legnagyobb előnye, hogy a forgalomirányító berendezésből a jelzőfejek izzóihoz kihúzott elektromos vezetékek hossza lerövidül a PLC és az izzók közötti távolságra. Ezzel jelentős költségmegtakarítást lehet elérni. Video link: http://player.vimeo.com/video/79551622
Dr. Tettamanti Tamás
Mintafelismerő algoritmus alkalmazása rövid és hosszú távú forgalom előrejelzéshez
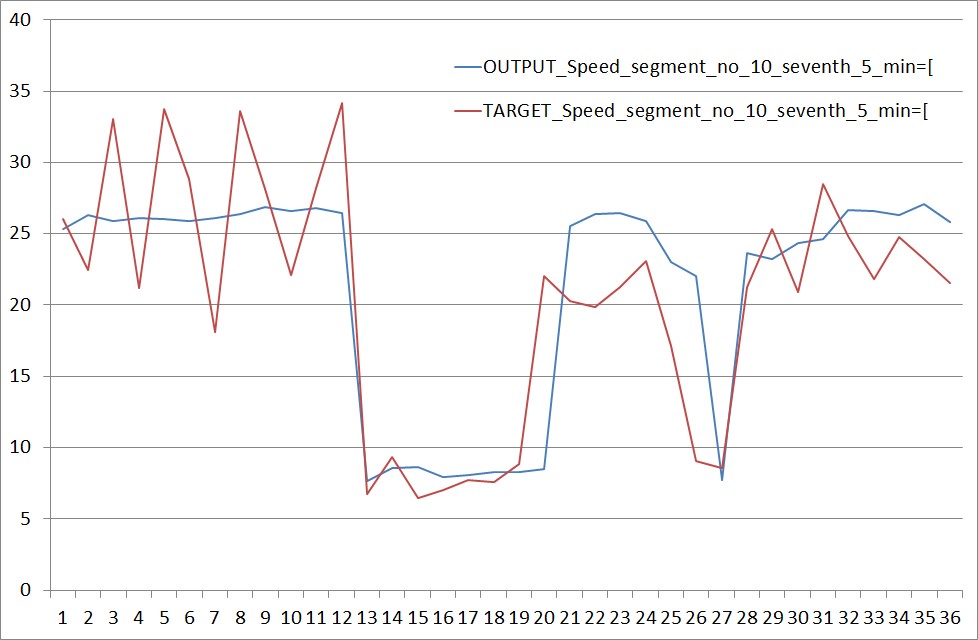 Kutatásunk során abból a jelenlegi tendenciából indultunk ki, hogy városi hálózatban rengeteg sebességinformáció rendelkezésre áll. Az egyik leggyakoribb ilyen adattípus a flottamenedzsment rendszerek által rögzített GPS alapú járműtrajektória információ, amely a járművek valós idejű monitorozását teszi lehetővé. Az FCD (Floating Car Data) rendszerekben egy fedélzeti egység valós időben szolgáltat adatokat a jármű aktuális sebességéről, pozíciójáról, illetve egyéb, az üzemeltető számára fontos jellemzőkről, például az üzemanyag fogyasztásról. Ezen adatok segítségével sebességek (utazási idők), honnan-hová információk, sőt útvonal adatok is megbízhatóan becsülhetők. Amennyiben nagy mennyiségű olyan mintaadat áll rendelkezésre egy adott közlekedési hálózatról, amely tartalmazza az útszakaszonkénti átlagsebesség időbeli alakulását (tipikusan FCD adatok), lehetőség nyílik a forgalom rövid-, illetve hosszú távú előrejelzésére mesterséges intelligencia alkalmazásával. A mintafelismerő (pattern recognition) algoritmusok lehetőséget adnak arra, hogy az adathalmaz vizsgálatával felismerjük. Ez a gyakorlatban azt jelenti, hogy számos forgalmi szimulációt lefuttatva a program képes legyen kiválasztani azokat a forgalmi képeket, amelyeket követően jellemzően torlódás szokott kialakulni, és amennyiben ugyanilyen mintát észlel, a valós forgalmi szituációban előre tudja jelezni a zavart. A technikát az Oktogon környéki teszthálózaton vizsgáltuk meg.
Kutatásunk során abból a jelenlegi tendenciából indultunk ki, hogy városi hálózatban rengeteg sebességinformáció rendelkezésre áll. Az egyik leggyakoribb ilyen adattípus a flottamenedzsment rendszerek által rögzített GPS alapú járműtrajektória információ, amely a járművek valós idejű monitorozását teszi lehetővé. Az FCD (Floating Car Data) rendszerekben egy fedélzeti egység valós időben szolgáltat adatokat a jármű aktuális sebességéről, pozíciójáról, illetve egyéb, az üzemeltető számára fontos jellemzőkről, például az üzemanyag fogyasztásról. Ezen adatok segítségével sebességek (utazási idők), honnan-hová információk, sőt útvonal adatok is megbízhatóan becsülhetők. Amennyiben nagy mennyiségű olyan mintaadat áll rendelkezésre egy adott közlekedési hálózatról, amely tartalmazza az útszakaszonkénti átlagsebesség időbeli alakulását (tipikusan FCD adatok), lehetőség nyílik a forgalom rövid-, illetve hosszú távú előrejelzésére mesterséges intelligencia alkalmazásával. A mintafelismerő (pattern recognition) algoritmusok lehetőséget adnak arra, hogy az adathalmaz vizsgálatával felismerjük. Ez a gyakorlatban azt jelenti, hogy számos forgalmi szimulációt lefuttatva a program képes legyen kiválasztani azokat a forgalmi képeket, amelyeket követően jellemzően torlódás szokott kialakulni, és amennyiben ugyanilyen mintát észlel, a valós forgalmi szituációban előre tudja jelezni a zavart. A technikát az Oktogon környéki teszthálózaton vizsgáltuk meg.