
")

Járműmechatronika
Kutatási témáink a járműmechatronika területén
Komponens szintű tervezés
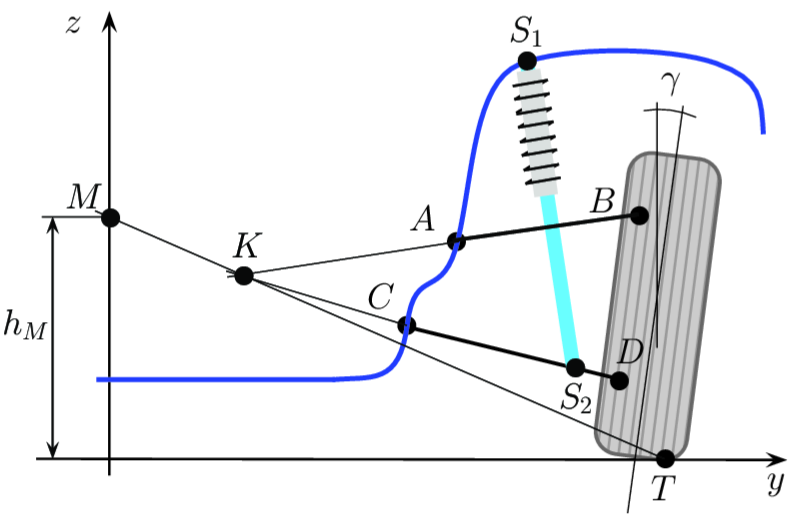
- modellezése
- minőségi specifikációk (trajektória követés, menetstabilitás, kényelem, üzemanyag, károsanyag kibocsátás),
- robusztus irányítástervezési módszerek és algoritmusok
Kooperatív irányítások
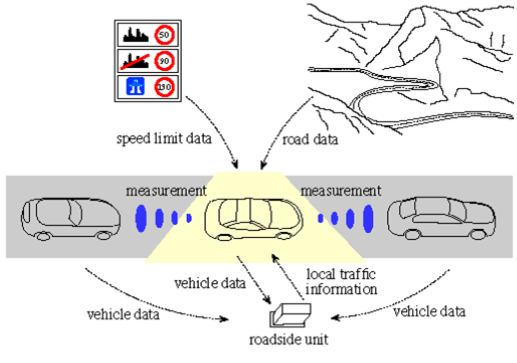
Járművek együttműködésének biztosítása közös célok elérése érdekében (üzemanyag fogyasztás és károsanyag kibocsátás csökkentése).
V2I/V2V kommunikáció hatásai:
- Közlekedés (átlagsebesség, járműsűrűség, várakozási idő)
- Vezetéstámogatás (parkolóhely keresés, sáv- és akadálydetektálás)
- Biztonság (konfliktushelyzetek feltárása, kereszteződés vagy sávváltás veszélyessége/biztonsága, hirtelen lassulásra/megállásra figyelmeztetés)
Integrált irányítás tervezés
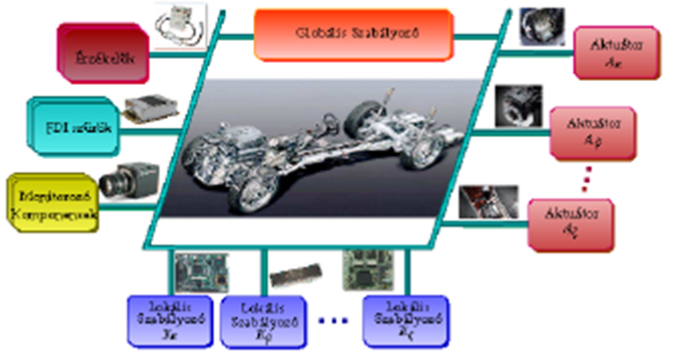
A dinamikát befolyásoló aktív beavatkozók összehangolt irányítása az előírt működési követelmények garantálása érdekében, valamint a biztonság és a megbízhatóság növelése érdekében.
- Prioritás: beavatkozók közötti hierarchia biztosítása.
- Rekonfigurálhatóság: a megváltozott minőségi feladatok garantálása.
- Hibatűrő irányítás: komponens meghibásodásának kezelése.
Jármű irányítórendszerének összehangolása a vezetővel és az infrastruktúrával
Többkritériumos tervezési feladat tényezői:
- utazási és szállítási idő
- energiaigény, fogyasztás
- domborzati viszonyok
- korlátozó táblák, előírások
- közlekedésben résztvevő járművek
- károsanyag kibocsátás
- vezető igényei
Kommunikáció
A járműállapot-információk gyűjtése, biztonságos továbbítása és felhasználása, új funkciók kifejlesztéséhez.
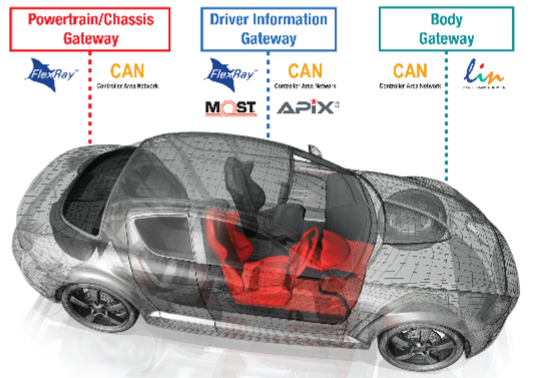
Járműfedélzeti hálózatok
- CAN, LIN, FlexRay
- Vezetéknélküli adattovábbítás
V2V és V2I kommunikáció
- Járművek közötti ad-hoc hálózatok
Cloud computing
- Járműfedélzeti gatewayek
- Okostelefon platformok
- Járműflotta kezelés
Beágyazott rendszerek

Járműipari vezérlőegységek jövőbeni funkcióinak, követelményeinek és architektúrájának kidolgozása.
- Járműipari mikrokontroller architektúrák
- Hardver architektúra tervezés
- Szoftver architektúra tervezés
- Környezetállósági tesztek, autóipari minőségbiztosítási szabványok, előírások
- Szenzorfúzió
- Autonóm járműfunkciók
- Software-in-the-Loop (SIL) és Hardware-in-the-Loop (HIL) tesztelés és szimuláció
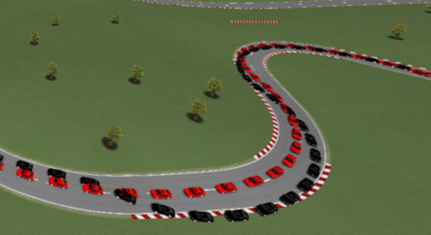
Mesterséges intelligencia alapú járműirányítás

Gépi tanulási módszerek kutatása autonóm járművek irányításhoz
- Szimulációs környezet implementálása
- Megerősítéses tanuló rendszerek tervezése
- Megerősítéses tanuló ágensek fejlesztése
- Optimális trajektóriatervezés
- Autonóm járműirányítás