
")






PLC based Traffic Light Control system with V2X Communication Simulation using SPaT/MAP messages
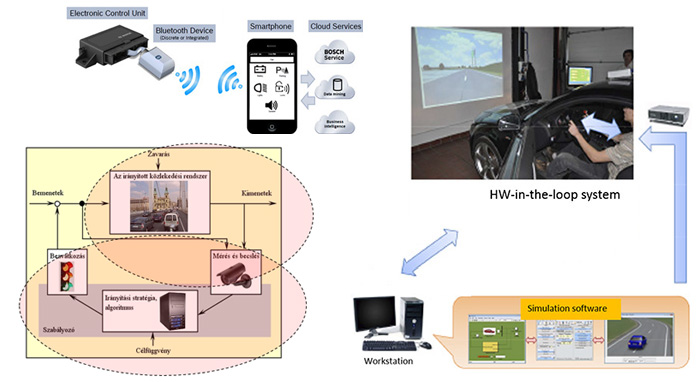
A PLC synchronized with OMNeT++ can simulate detailed V2X and I2V/V2I communication with virtualized traffic. The HIL test can be run in real-time. The PLC is responsible for providing traffic light state information with standardized SPaT/MAP messages for the virtual traffic. This HIL test demonstrates the PLC-based traffic light control's capabilities and the advantages of simulating communication. This way, the traffic light program is very flexible, and a mixed reality system is realized. A flexible traffic light program is a requirement in case of enormous testing of autonomous vehicles and their behavior to faulty traffic lights.












